
微信扫码立即登录



我已阅读并同意
《艾景奖服务使用协议》和《艾景奖用户隐私条款》
《艾景奖服务使用协议》和《艾景奖用户隐私条款》





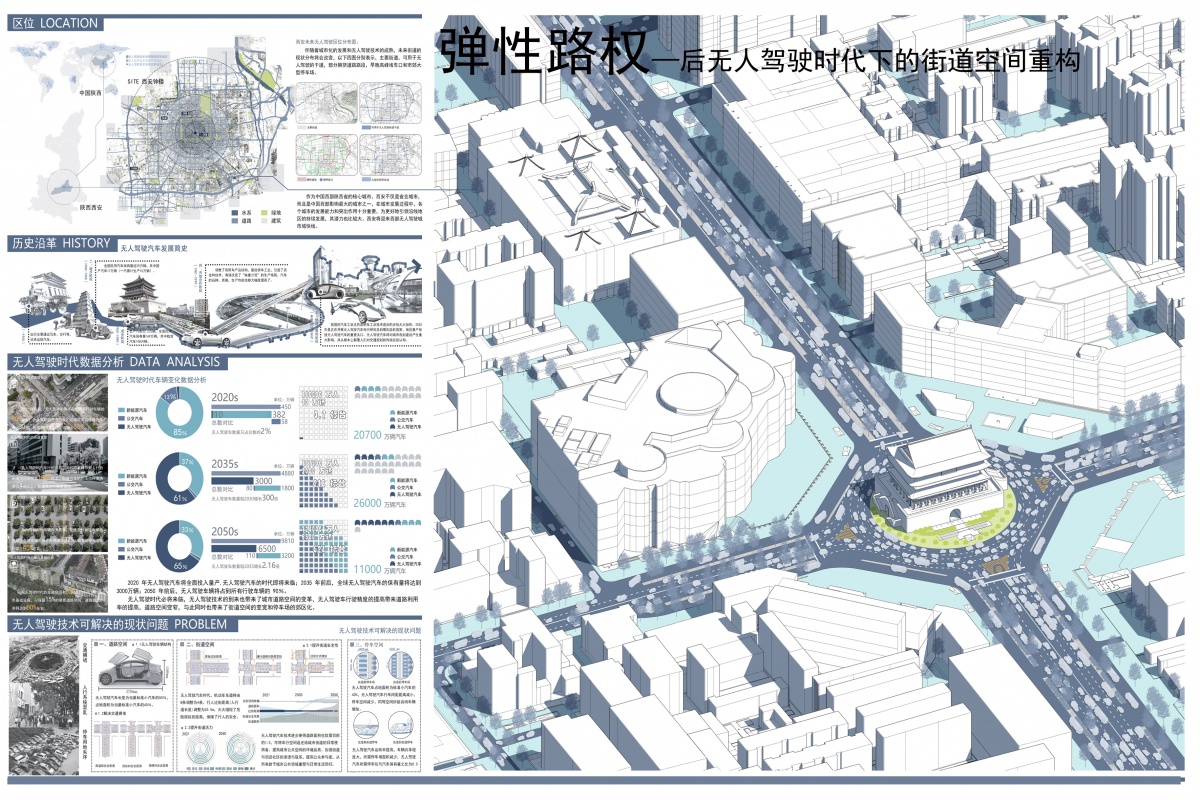
弹性路权——后无人驾驶时代的城市街道空间重构
Resilient Right of Way——street space remodelling in the post-driverless era
主创设计:李畅
设计成员:袁涛 贺舒雅 高凯凡
指导老师:吕小辉
作品编号:ILIA-S-202110221
参赛组别:学生组
作品类别:方案设计 - 城乡公共空间
 4
4热度:5841
项目详情
设计说明
设计感悟
设计亮点
评论
项目详情
申报类别:作品奖
项目名称:弹性路权——后无人驾驶时代的城市街道空间重构
院校名称:西安建筑科技大学-艺术学院
指导老师:吕小辉
主创姓名:李畅
成员姓名:袁涛 贺舒雅 高凯凡
设计时间:2021-06-08
项目地点:西安市
项目类别:方案设计-城乡公共空间
1.无人驾驶分析前期
设计说明
设计说明:
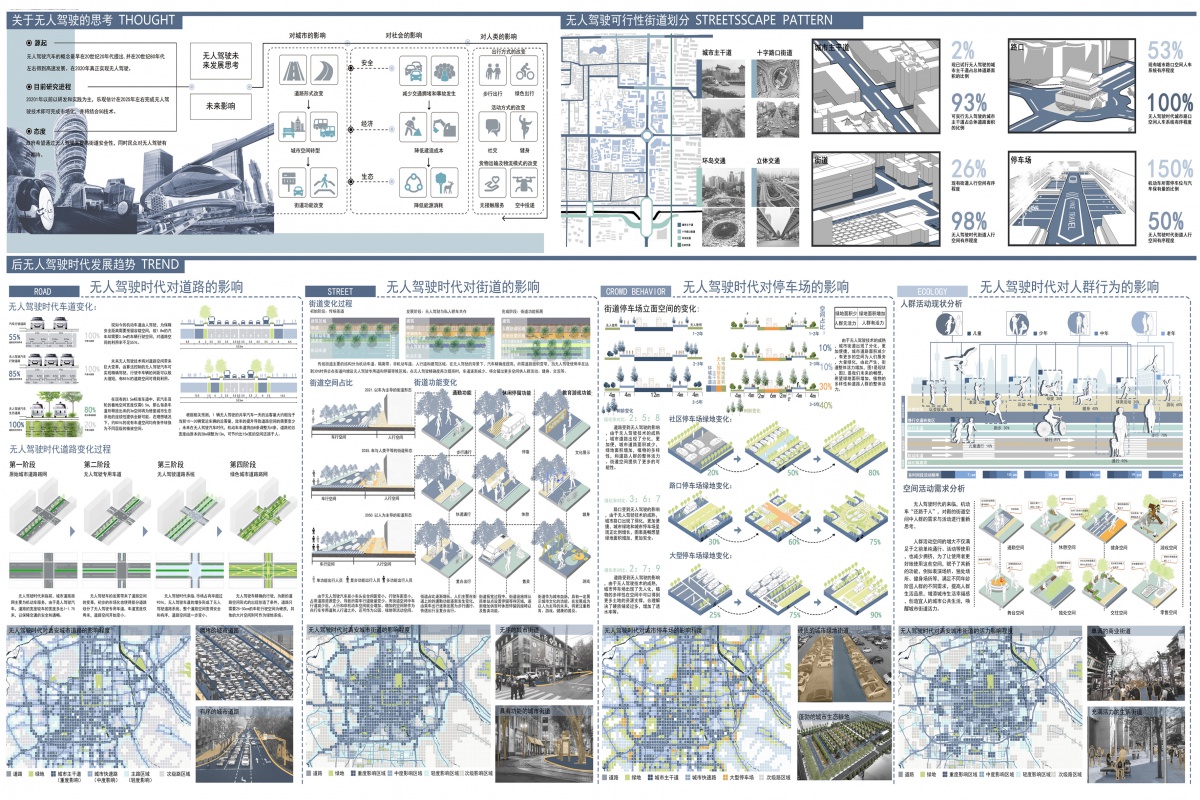
无人驾驶时代的来临将会重塑城市的形态与空间。更加高效的交通方式将帮助释放大量的城市道路、城市街道和停车空间,并且无人驾驶汽车时代车辆效率大增,车俩减少一半,车道数量减少,人行空间增加,在汽车“还路于人”之后,街道将会迎来新的形态,街道“权力”也将会由以车为主导转变为以人为主导。如何重新定义城市中人与交通工具的路权归属成为了亟待讨论的议题。
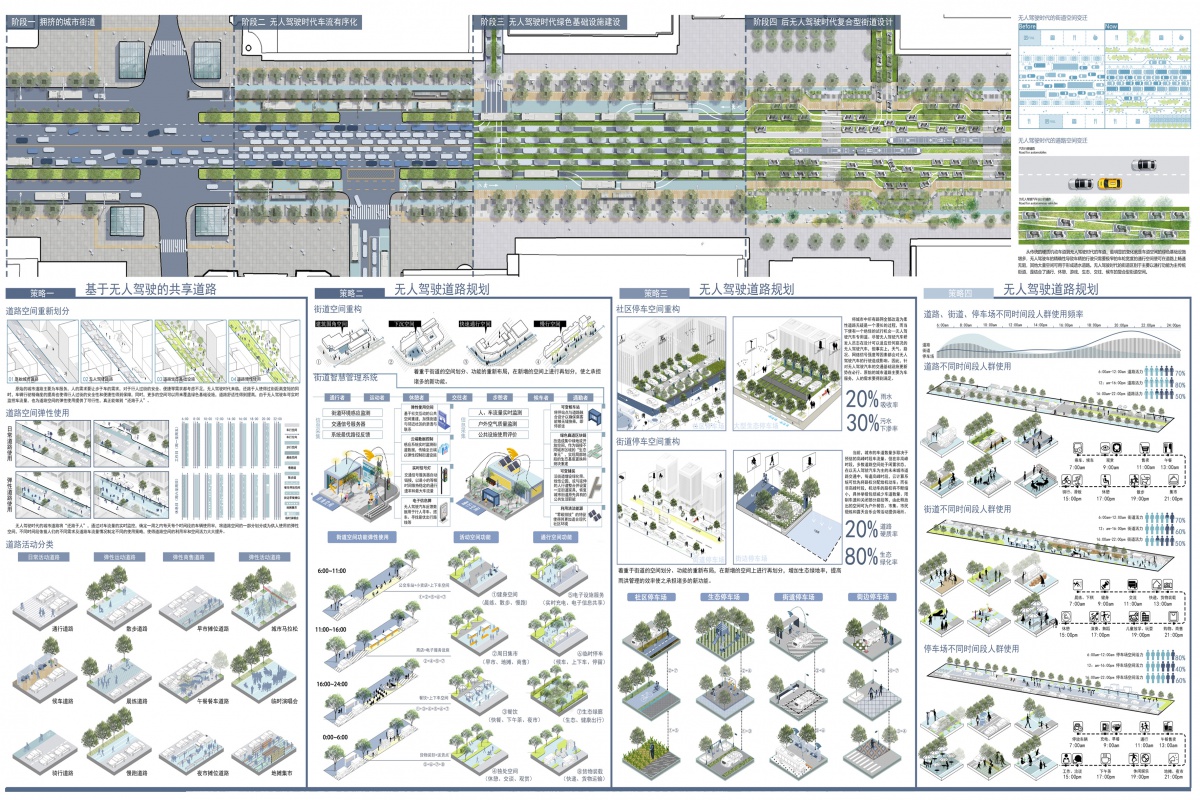
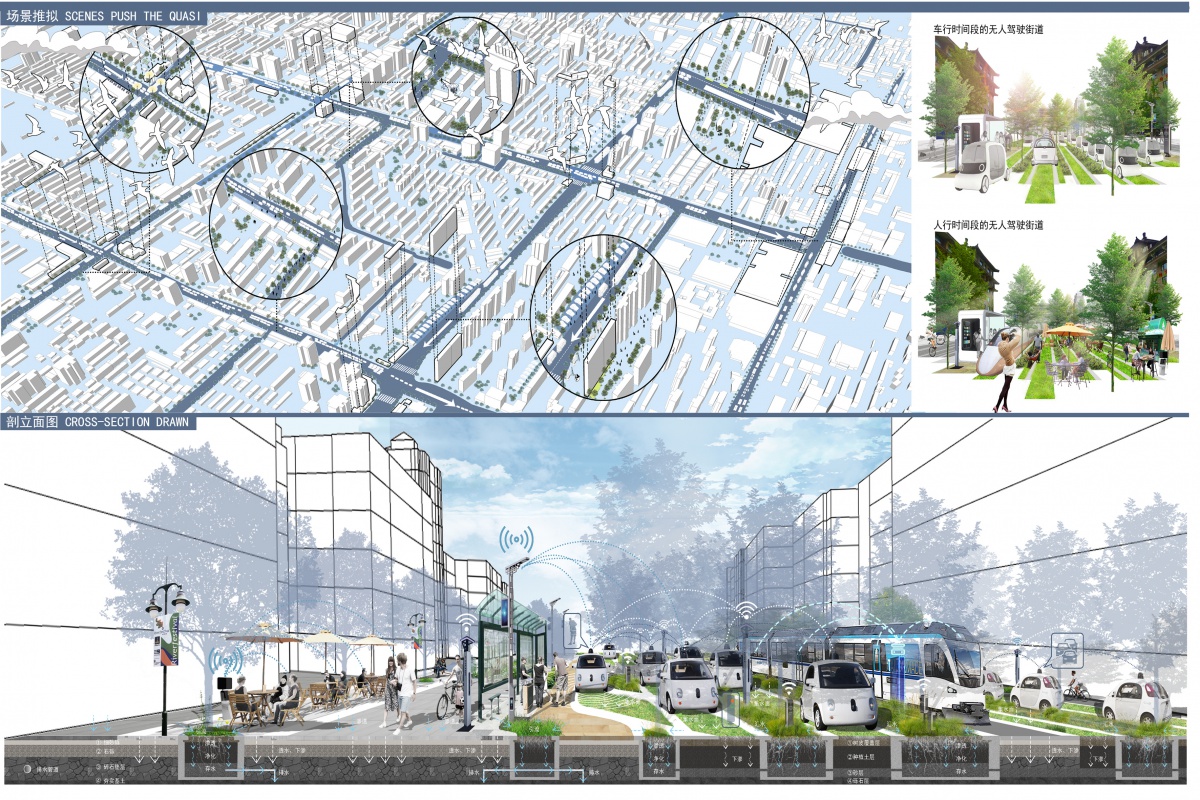
本设计旨在为平衡“路权”而对街道空间进行重构,目的在于打造基于无人驾驶汽车时代的新型街道空间。设计策略则是分别将无人驾驶时代所释放出的空间进行重新规划,以无人驾驶汽车的特征为主导,分别划分出道路空间、街道空间和停车空间的弹性使用时间,赋予其新的使用功能。其中道路空间主要分为过街方式、道路绿化以及道路设施等,街道空间主要划分为街角空间、街边空间以及建筑前空间,停车空间主要划分为社区停车场、街边停车以及郊区停车。通过对所释放出来的空间弹性利用,从而满足各个阶层与年龄段人群的需求,唤醒城市街道新活力,共享城市新生活。
无人驾驶时代的来临将会重塑城市的形态与空间。更加高效的交通方式将帮助释放大量的城市道路、城市街道和停车空间,并且无人驾驶汽车时代车辆效率大增,车俩减少一半,车道数量减少,人行空间增加,在汽车“还路于人”之后,街道将会迎来新的形态,街道“权力”也将会由以车为主导转变为以人为主导。如何重新定义城市中人与交通工具的路权归属成为了亟待讨论的议题。
本设计旨在为平衡“路权”而对街道空间进行重构,目的在于打造基于无人驾驶汽车时代的新型街道空间。设计策略则是分别将无人驾驶时代所释放出的空间进行重新规划,以无人驾驶汽车的特征为主导,分别划分出道路空间、街道空间和停车空间的弹性使用时间,赋予其新的使用功能。其中道路空间主要分为过街方式、道路绿化以及道路设施等,街道空间主要划分为街角空间、街边空间以及建筑前空间,停车空间主要划分为社区停车场、街边停车以及郊区停车。通过对所释放出来的空间弹性利用,从而满足各个阶层与年龄段人群的需求,唤醒城市街道新活力,共享城市新生活。
2.无人驾驶策略思考
3.平面图+方法.jpg
4.场景推拟+效果图+剖立面图.jpg
设计感悟
本次设计从城市街道发展的规律导向和现状问题出发,用现存的街道发展问题以及最新的无人驾驶技术发展,对未来城市街道发展提出预想,通过对未来城市街道的弹性使用以及街道重构分析,反思且指导当今城市街道的建设,从而提供新的视角,积极面对即将到来无人驾驶时代所带来的挑战,具有一定的前瞻性。
设计亮点
本次设计从城市街道发展的规律导向和现状问题出发,用现存的街道发展问题以及最新的无人驾驶技术发展,对未来城市街道发展提出预想,通过对未来城市街道的弹性使用以及街道重构分析,反思且指导当今城市街道的建设,从而提供新的视角,积极面对即将到来无人驾驶时代所带来的挑战,具有一定的前瞻性。
专家评语

作者大胆的构想了无人驾驶时代下如何重塑城市的形态与空间的问题。选题具有重要意义,规划理念新颖,逻辑清晰,内容完整,图纸表达出色。
设计的立意具有创新性,畅想了人工智能演替发展时代背景下,城市交通空间由灰色设施向绿色生态化空间转变的可能性和可行性。设计思路清晰,分析多元化,图面表达充分。

版权所有:艾景奖(北京)建筑科学研究院 @ 1996-2020
网站备案号:京ICP备13027937号-2
 京公网安备 11010202009564号
京公网安备 11010202009564号
京公网安备 11010202009564号
全部评论0